Precision Engineering
인간 중심 설계로 자연스러운
인간 중심 설계로 자연스러운
움직임과 안전한 상호작용을
실현합니다.
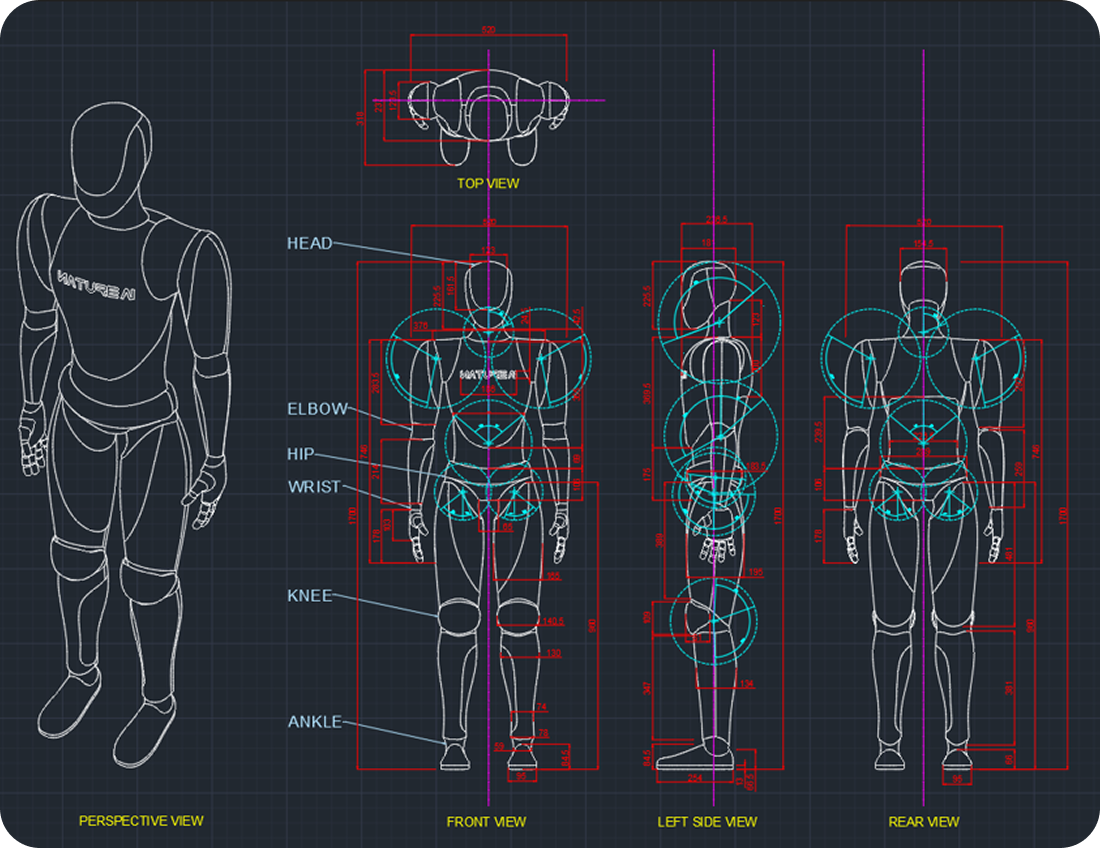
교육 환경에서의 안전성과 반복 동작 내구성을
최우선으로 설계합니다.
관절 설계, 무게중심(CoG), 센서 배치 최적화로
‘안정적으로 서고,
자연스럽게 반응하는’ 구조를 지향합니다.